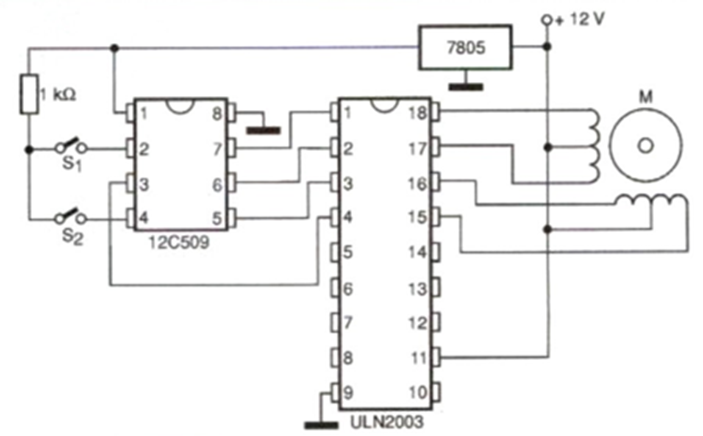
En esta aplicación utilizamos un circuito de entrada adicional para habilitar comandos lógicos con interruptores, sensores u otros recursos. La activación de cada bobina del motor dependerá de la combinación de niveles que proporcionen los sensores de entrada, según una tabla similar al circuito anterior. El circuito integrado utilizado es el ULN2803, que también puede controlar motores de hasta 500 mA por devanado. Tenga en cuenta que tenemos un circuito regulador de tensión de 5 V que reduce los 12 V de la fuente del motor a los 5 V necesarios para alimentar el circuito lógico 12C509. Las entradas no utilizadas de este circuito deben conectarse a tierra a través de una resistencia de 10k ohms para evitar inestabilidades de funcionamiento. El circuito integrado 7805 no necesitará radiador de calor, dada la baja corriente que debe proporcionar. El 12C509 es un PIC que debe programarse para esta función. Puede encontrar más información sobre cómo utilizar este componente en esta aplicación en: www.beowulf.demon. co.uk/stepper.html y en www.phanderson.com/PIC12C509/overview.html