



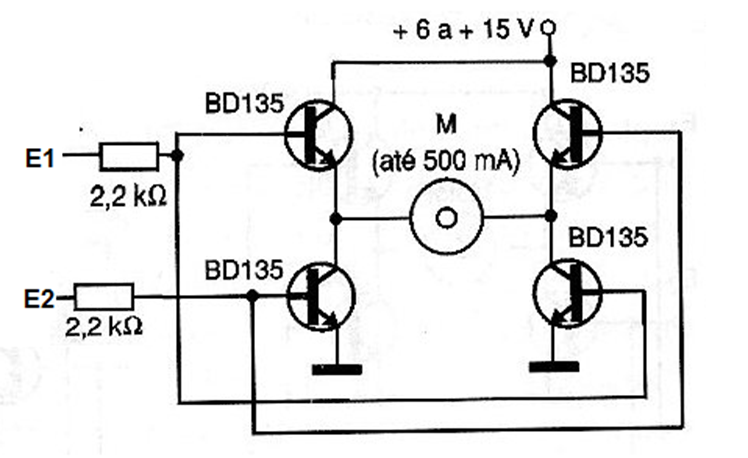
El sentido de rotación del motor M puede ser controlado por un Arduino u otro microcontrolador a través de este puente H. Los niveles 00 mantienen el motor parado mientras que 01 y 10 determinan la rotación en las dos direcciones posibles. La salida 11 está prohibida porque hace que los transistores conduzcan al mismo tiempo, provocando un cortocircuito en el circuito. Las salidas se pueden modular para obtener control de velocidad PWM en la dirección deseada.
| Clique na imagem para ampliar |
