La necesidad de monitorear la posición de piezas móviles, medir su velocidad de desplazamiento o rotación está presente tanto en equipos industriales como de consumo, electrónica embarcada y en muchos otros sectores. Una solución ampliamente adoptada es la que hace uso si sensores magnetorresistivos. Vea en este artículo cómo funcionan y cuáles son sus principales características. El artículo se basó en la información de Application Note 20 de Zetex.
Los sensores magnetorresistivos son componentes cuya resistencia eléctrica depende de la intensidad del campo magnético que corta su elemento sensible más allá del ángulo según el cual esto ocurre.
Las variaciones de intensidad (y / o orientación) de un campo pueden entonces ser convertidas en señales eléctricas y procesadas por un circuito externo de forma inmediata.
Los sensores típicos están formados por finas tiras de película metálica depositadas en un chip, como muestra la figura 1.
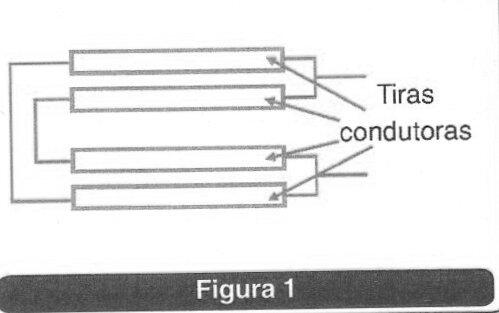
Estas tiras son depositadas por un proceso de litografía que consiste básicamente en la combinación de Níquel con hierro en la proporción del 81% de níquel al 19% de hierro).
El chip se fabrica en una oblea de silicio oxidado.
La resistividad del material cambia por el efecto magnetorresistivo. Como muestra la figura 2, el campo Hy hace que se produzca un cambio de la magnetización de las tiras depositadas.
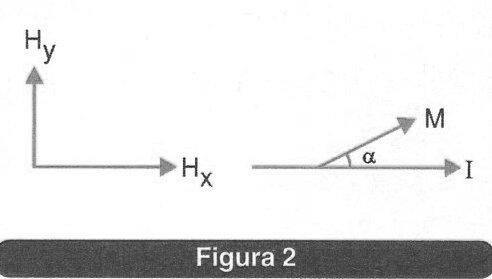
Como la resistividad R de una tira de permalloy depende del ángulo entre la magnetización M y el sentido de circulación de la corriente (I) el cambio del campo altera la resistencia final de la tira.
La variación de la resistencia obtenida en un sensor de este tipo es muy baja, del orden del 2 al 3% para el permalloy, lo que requiere circuitos sensibles para operar con ese tipo de sensor.
Las variaciones de la resistencia también dependen de las dimensiones geométricas de las tiras y la anisotropía magnética del permalloy. Esto hace que este tipo de sensor normalmente no lineal.
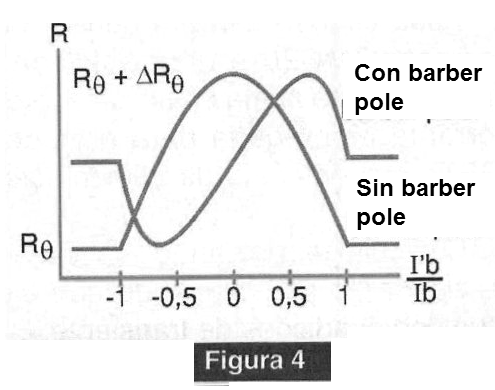
Así, si es necesario operarlo con una característica lineal un recurso consiste en usar la geometría denominada "Barber Pole".
Lo que se hace en este caso, como muestra la figura 3, consiste en cubrir las tiras con barras de aluminio inclinadas de 45º.
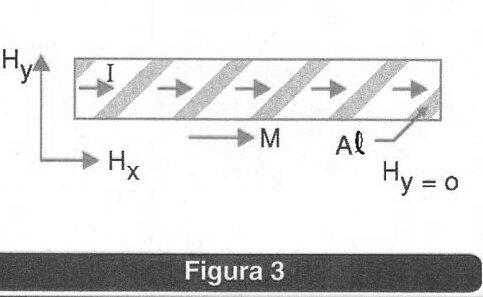
El aluminio posee una baja resistividad en relación al permalloy lo que hace que la dirección de la corriente cambie, quedando desplazado de 45º.
El resultado es que se obtiene una con ello una característica mucho más cercana a la lineal, como muestran las curvas comparativas en la figura 4.
En la práctica
En un sensor común, las tiras del chip magnetorresistivo están dispuestas para formar un patrón bien definido, como muestra la figura 5.
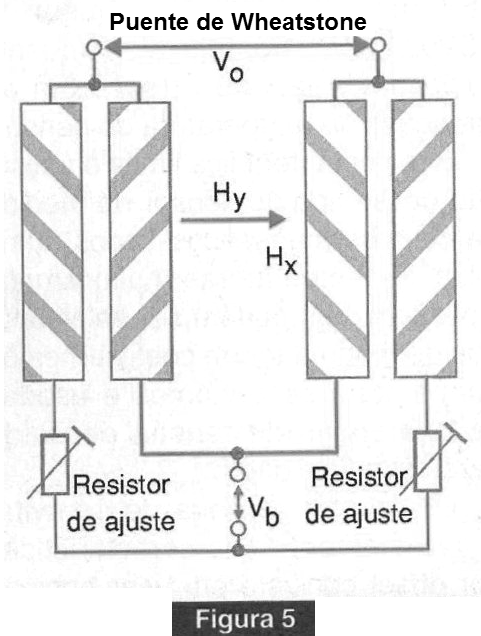
Ellas forman un puente de Wheatstone de tal modo que no sólo se tienen en cuenta las resistencias eléctricas, sino también la acción de los campos magnéticos externos en cada una de ellas.
Cada mitad del puente consiste en dos resistores con orientaciones diferentes para los Barber Pole. Las tensiones entre los resistores cambia con la aplicación de un campo magnético.
Ellos son dispositivos de tal manera que, cuando la resistencia de uno aumenta, la resistencia del otro disminuye, bajo la acción del mismo campo.
La otra mitad del puente permite aumentar aún más la diferencia de tensión obtenida entre estos dos resistores.
En la práctica los sensores se ajustan cuidadosamente en el proceso de fabricación para obtener una tensión nula de salida cuando no se aplica ningún campo magnético.
Uso y Parámetros
El formato de las tiras y la anisotropía del permalloy sólo define un eje según el actual ocurre la magnetización sin la presencia de un campo externo.
Esto significa que, en estas condiciones, una tira puede tener diferentes orientaciones para magnetización o dominios magnéticos, lo que hace que su operación sea inestable.
Así, para que el sensor pueda ser utilizado de forma conveniente es aplicado campo magnético auxiliar externo Hx. Este campo define la orientación de la magnetización.
Por lo tanto, la pista Hy de campos en los que el sensor tiene una operación segura está determinada por la intensidad del campo auxiliar Hx. Se puede entonces definir un Área de Operación Segura o (SOA - Safe Operating Area) para el sensor, como muestra la figura 6.
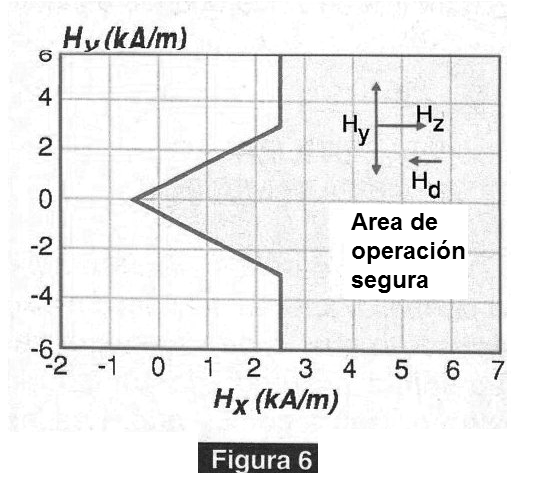
El campo Htot = Hy + Hx determina los valores permitidos de Hy.
Para crear el campo auxiliar se utiliza normalmente un pequeño imán permanente. Sin embargo, hay sensores en los que ya se incorpora este imán.
En las hojas de datos de estos componentes, el comportamiento del puente de Wheatstone se refiere a una tensión de entrada Vb = 1 V, ya que en esta región tenemos una relación lineal entre la tensión de entrada y la tensión de salida.
La sensibilidad S (dada en mV / V / kA / m) de un sensor de este tipo se define como el desplazamiento de la tensión de salida en función de la intensidad del campo externo a la banda de -1 kA / m
Este parámetro depende tanto de la geometría de las tiras como del campo auxiliar.
En la figura 7 mostramos las características típicas del sensor ZMY20 / ZMZ20 de Zetex.
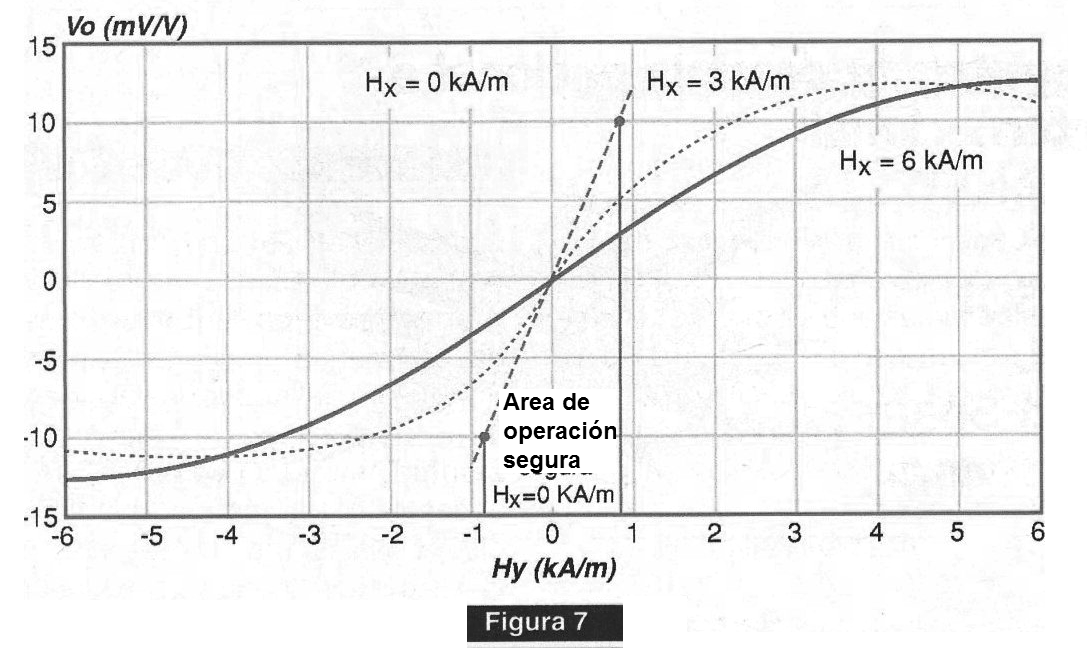
Observe que el área de operación segura es bastante estrecha, en cuyo caso se obtiene la mayor sensibilidad.
El puente de Wheatstone se balancea sin la aplicación de un campo externo. En este caso, la tensión de salida del sensor es cercana a cero a temperatura ambiente. Sin embargo, esta tensión en la práctica no es cero debido a la precisión del proceso de fabricación.
La tensión de offset (offset voltage) o Voff / Vb de un sensor es una indicación de esa desviación.
También se debe considerar que, con las variaciones de temperatura, el puente no puede compensar la tensión offset. Por lo tanto, debe indicarse el coeficiente de temperatura de la tensión de offset del sensor o TCVoff.
Este parámetro dice cuánto varía la tensión de offset con las variaciones de la temperatura del sensor.
Esta característica limita la aplicación de este tipo de sensor en la medida de campos magnéticos débiles en un rango de temperaturas muy amplio.
Dos sensores se pueden seleccionar para tener coeficientes de temperatura similares y se utilizan las diferencias de tensión de salida para este propósito.
Otra manera de evitar el desplazamiento de las características por offset consiste en utilizar bobinas para generar el campo auxiliar. El campo puede ser invertido y con ello la tensión de la señal de salida.
Otras características de este tipo de sensor son la histéresis de la tensión de salida y el rango máximo de tensiones de salida.
En el caso de la histéresis se produce por el hecho de que la magnetización de las tiras del sensor no es uniforme. En las esquinas de las tiras donde se cambia la magnetización, quedan áreas en las esquinas de las tiras donde la magnetización es alterada y con ello no responde de la manera esperada a los campos externos.
Aplicaciones Prácticas
Un circuito típico de aplicación, sugerido por Zetex, se muestra en la figura 8.
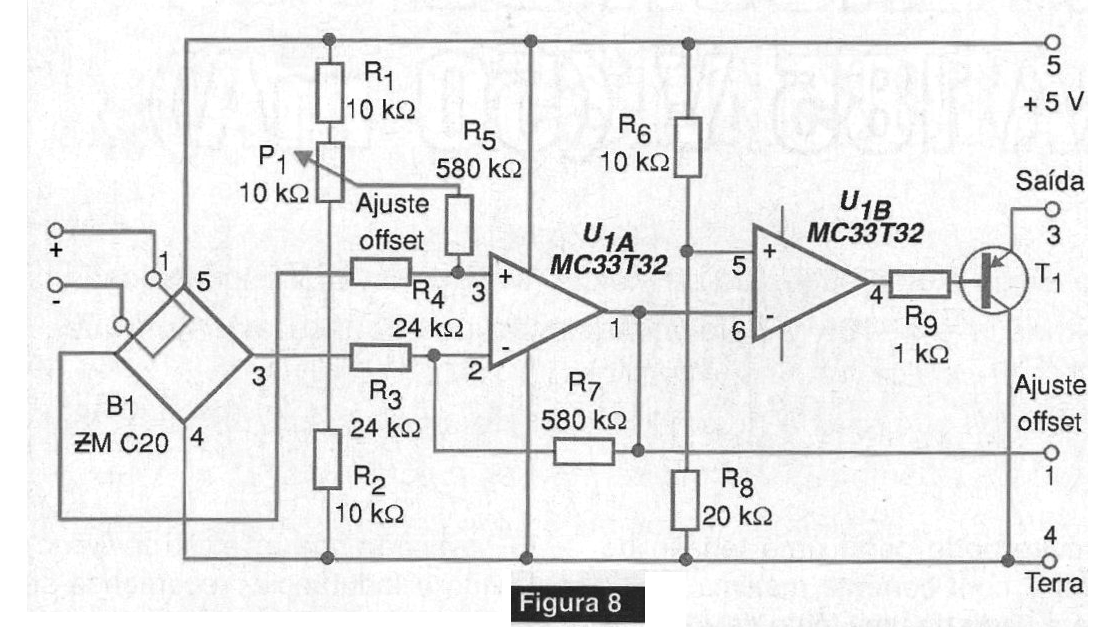
Este circuito utiliza un sensor de corriente ZMC20 y una aplicación típica consiste en una clave de sobrecorriente utilizada para proteger IGBT en sistemas de alimentación de motores.
El circuito tiene un tiempo de reacción de sólo 3 us, impidiendo que el circuito actúe bajo condiciones de transitorio.
El ajuste externo hecho en un trimpot de 10 k se realiza para compensar el offset. La tensión de alimentación es de 5 V y el consumo es de 10 mA. La salida se realiza a través de un transistor con colector abierto capaz de suministrar una corriente de 1 A en un circuito de 20 V.
Se muestra otro circuito de aplicación interesante en la figura 9.
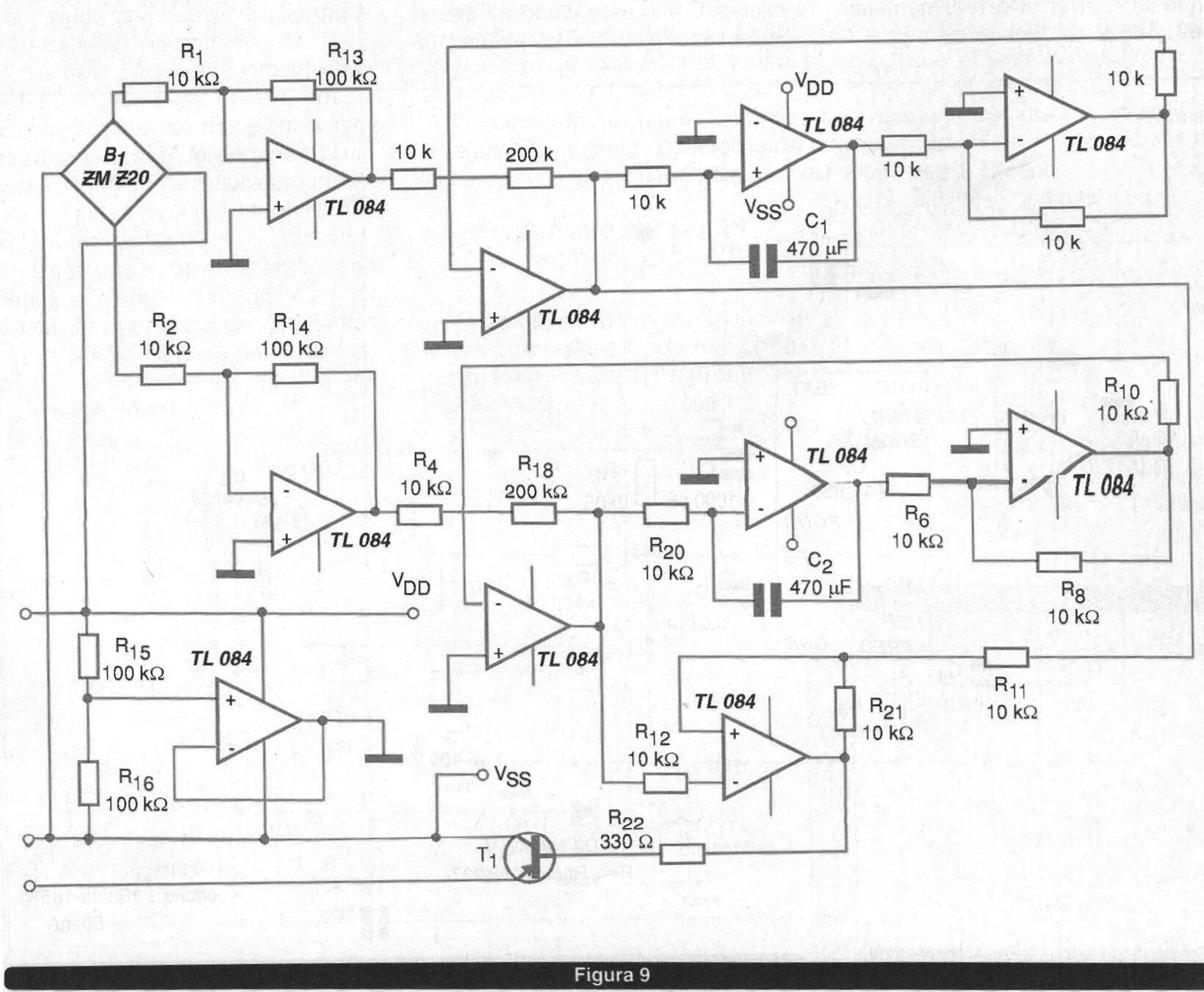
Este circuito consiste en una solución interesante para la medida de revoluciones, usando un campo magnético modulado debido a la presencia de un diente en un engranaje u otra pieza.
El circuito proporciona en su salida una señal que es proporcional a la velocidad de rotación del diente usado como sensor y permanece en el nivel alto cuando el sistema está parado.
Conclusión
Para los proyectos actuales de circuitos que hagan uso de este tipo de sensor, el lector puede contar con una gran cantidad de componentes.
Lo importante para los lectores es conocer su principio de funcionamiento para que puedan dimensionar correctamente los elementos del circuito y también el modo en que van a funcionar.
Muchos sensores modernos ya están diseñados para incorporar los circuitos de procesamiento capaces de proporcionar salidas digitalizadas, lo que simplifica bastante un proyecto.
Sin embargo, para el profesional del mantenimiento es siempre importante recordar que en un equipo más antiguo él puede encontrar las primeras versiones de estos sensores y por eso debe saber cómo trabajar con ellos para poder realizar una reparación, ajuste o aún detectar un fallo.