Las modernas cámaras de video y máquinas fotográficas están dotadas de un sistema de foco automático. Este sistema permite que las lentes se ajusten según la distancia a que está el objeto en e! visor, proporcionando así una imagen siempre nítida. Cómo funciona este sistema es el tema de este artículo.
Diversos modelos de máquinas fotográficas y también de cámaras de video están dotados de un dispositivo llamado "foco automático".
Este dispositivo ”capta" la distancia a la que está ubicado el objeto y ajusta automáticamente la lente de la máquina o cámara de modo de obtener un enfoque nítido sin la intervención del operador, como muestra la figura 1.
lo que ocurre con una cámara sin este ajuste es que el operador precisa mover las lentes hacia adelante o hacia atrás a través de un sistema de engranajes, de modo que la imagen, según la distancia a que se encuentra caiga en el foco de la lente y así se logre una reproducción nítida, como muestra la figura 2.

No es posible fijar las posiciones de la lente para obtener una imagen nítida bajo cualquier condición, pues cuando obtenemos el punto ideal para una imagen próxima, este mismo punto no sirve para imágenes distantes.
Las máquinas fotográficas comunes están dotadas de una regulación para 3 o 4 distancias que generalmente comienzan en algunos centímetros y van hasta el infinito, como muestra la figura 3.

Evidentemente, la tendencia moderna es automatizar todo tanto en cámaras fotográficas como en video, de modo que el ajuste de foco, bastante incómodo. principalmente cuando se tiene necesidad de registrar una imagen rápidamente, no podría escapar a esta tendencia.
¿Cómo podemos usar la electrónica para ayudar automáticamente a enfocar una cámara?
La disponibilidad de circuitos electrónicos compactos y bastante sofisticados permite que este recurso ya esté presente en muchos equipos comerciales. Básicamente existen dos tipos de ajuste de foco automático, ambos basados en la medida de la distancia en que se encuentra el objeto.
a) Sistema ultrasónico
Este sistema es usado en la cámara Polaroid SX-7° (El artículo es de 1991) y se basa en el mismo principio según el cual se orientan los murciélagos y los delfines: la emisión de una señal ultrasónica y su recepción.
Con la estimación del tiempo que la señal tarda en ir y volver hasta el obstáculo se puede tener una idea de su distancia.
Para una distancia de 3 metros, por ejemplo, la señal ultrasónica lleva aproximadamente 18 milisegundos para ir y volver. Suponiendo que el circuito pueda detectar el eco con una precisión de 20 microsegundos eso significa que el error aproximado en el ajuste de foco será de sólo 4 mm, 10 que es excelente en este caso, no significando pérdida visible de foco en la foto obtenida.
Como muestra la figura 4 la cámara está dotada de un emisor de ultrasonidos que es accionado cuando se ajusta la máquina para obtener una foto.

La señal se refleja en el objeto a fotografiar y es recibida por un sensor muy sensible conectado a un pequeño procesador.
El procesador "mide" entonces el tiempo que tarda la sena] para ir y volver hasta la cámara determinando así la distancia del objeto a ser fotografiado. En función de este dato, el mismo envía una señal a un servomotor que ajusta automáticamente el foco de la lente para la distancia en cuestión.
Cuando la máquina está lista para tomar la foto, lo que no demora más que algunos segundos, se da un aviso al operador.
b) Sistema Optar
Optar es la abreviatura de Optical Automatic Ranging, un dispositivo desarrollado por Kualmaun basado en sistemas antiguos utilizados algunos desde 1860.
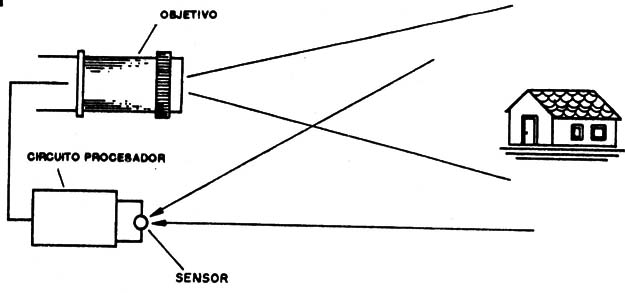
Si tuviéramos, por ejemplo, una lente convergente, como muestra la figura 5, y la utilizamos para captar la imagen de un objeto brillante como por ejemplo el sol o una lámpara (imagen no puntual) veremos que el tamaño de la imagen proyectada en una pantalla depende de la distancia que separa los dos: lente y pantalla.

Así, cuanto más lejos esté la lente, mayor será la imagen y menor la luminosidad producida. El máximo de luminosidad de la imagen y menor tamaño se obtendrá cuando la distancia de la pantalla a la lente sea igual a la distancia focal.
A partir de allí, aproximándose más la lente, nuevamente tendremos la disminución de la luminosidad y aumento del tamaño de la imagen. Podemos usar este hecho para detectar el punto ideal de ajuste de foco de una lente, colocando en el plano focal de la lente un sensor, conectado a un circuito que accione un servomotor, como muestra la figura 6.

Con la presencia de luz, este circuito ajustará automáticamente la posición de la lente para un punto de máximo en que se obtiene la imagen más nítida.
Vea que este razonamiento no vale sólo para un objeto luminoso extenso como e una lámpara o el sol.
Cualquier imagen refleja luz, y su intensidad en una pantalla también dependerá de su distancia en relación a la lente.
Resumiendo, este dispositivo consigne ajustar el foco de una cámara por el simple movimiento de la lente hasta obtener el máximo de luz.
Una de las desventajas de este sistema está en el hecho de que normalmente las imágenes enfocadas pueden tener una gama de intensidades luminosas muy gran de, lo que exige un circuito bastante flexible respecto a la sensibilidad.
Hay sistemas diferentes que permiten superar este problema.
c) Sistema Auto-Focus de la Canon
Un primer intento de obtener un ajuste de foco automático un poco mejor fue pre-sentado en 1963 por Canon, pero incluso este sistema, por tener todavía deficiencias, nunca fue comercializado.
En este sistema, como muestra la figura 7 tenemos dos células de sulfuro de cadmio (Cds) o LDRs que recibían la luz del objeto enfocado por dos caminos diferentes.
")
Una recibía la luz directamente a partir de una abertura en la máquina, sirviendo de referencia. la otra recibía luz a través de la lente de la máquina, que debería ser ajustada.
Con la imagen fuera de foco, las intensidades de luz incidentes en las dos células eran diferentes, habiendo así una señal diferencial que seria para accionar un servomotor.
El servomotor movía la lente en el sentido de obtener dos señales con la misma intensidad, cuando la salida diferencial sería nula y el ajuste estaría completo. Uno de los mayores defectos del sistema, y que impidió su comercialización residía en el hecho de que el ajuste dependía de la existencia de contrastes en la imagen focalizada. Una imagen sin contraste nunca podría ser "neutralizada" con el movimiento de la lente, obteniéndose así el nulo para la detención del servomotor.
Un sistema mejor y que se utiliza actualmente en muchas cámaras es el que hace uso de un telémetro.
d) Sistema Telemétrico
Este sistema, bastante más eficiente, fue utilizado con éxito en diversos tipos de cámaras a partir de 1972, como por ejemplo Sankyo, Canon, Elmo, Pentax, Zoon, Konica, etc.
Veamos cómo funciona tomando como base la figura 8.

Como podemos ver, existen dos espejos que captan la luz proveniente del objeto enfocado, según trayectorias diferentes, reflejándola sobre un prisma que, a partir de una nueva reflexión hace incidir la luz en dos sensores.
Los rayos de luz que vienen del objeto enfocado no son perfectamente paralelos, sino que siguen trayectorias cuyo ángulo depende de la distancia que deben recorrer, como muestra la figura 9.

De esta forma, los ángulos de los espejos que reflejan la luz hacia el prisma deben variar según la distancia del objeto enfocado para que tengamos intensidades de luz iguales.
En la práctica solamente uno de los espejos es movido a partir de un servomotor que está acoplado a un microprocesador.
El microprocesador recibe también señal de los fotosensores de modo que, al enfocar un objeto el sistema actúa en el sentido de mover el espejo para que las intensidades de luz en los sensores sean iguales. Al mismo tiempo, el procesador capta cual es el ángulo del espejo en que esto ocurre y en su función ajusta el motor que moverá el objetivo de la máquina.
Cuando el objetivo es ajustado para el foco ideal, se da una serial al operador que entonces puede sacar su foto.
e) Otros sistemas
Se pueden encontrar variaciones alrededor de los sistemas descriptos, tanto en filmadoras, cámaras de video y máquinas fotográficas. Un ejemplo es una variación bastante sofisticada del sistema ultrasónico que hace uso de radiación infrarroja. En este sistema, la máquina envía un tren de pulsos en dirección al objeto a ser focalizado, recibiendo a través de un sensor la luz reflejada.
Como la señal infrarroja tiene que recorrer una cierta distancia para ir y volver, reflejándose en el objeto enfocado, los pulsos de modulación son desfasados en relación a los producidos por el aparato, como muestra la figura 10.

Un circuito electrónico mide entonces este desfasaje, estableciendo así con pre-cisión la distancia en que se encuentra el objeto en que ocurrió la reflexión.
En función de esta distancia un servomotor actúa ajustando automáticamente el foco de la máquina.
Conclusión
La tendencia en las cámaras de video, así como las máquinas fotográficas, es una automatización cada vez mayor que posibilite la obtención de imágenes cada vez más perfectas.
Una novedad en este campo, y que muestra hasta qué punto la electrónica va también a "conquistar" este terreno, es una cámara de video lanzada recientemente en el Japón (1991), en que la tradicional película es sustituida por una memoria de computadora del tamaño de un sello, que registra la imagen.
Para "ver" la foto registrada basta introducir la memoria en una lectora especial que es acoplada a cualquier televisor común.
Publicado en 1991 (revisado en 2017)