Ofrecemos el proyecto completo de un barco con control remoto, desde el sistema electrónico hasta la instalación en el modelo, para que el lector pueda montar todo sin dificultades. Sencillo de montar y todavía más sencilla de poner en funcionamiento.
En nuestros artículos sobre radio control, siempre tratamos de elaborar circuitos simples al alcance de todos, principalmente para los hobistas, pero siempre surgen algunas dificultades.
Una de las dificultades era el propio modelo, mientras que otra era el sistema mecánico de propulsión y dirección. Las pocas casas especializadas en modelismo están en las grandes ciudades y no siempre cuentan con el material necesario para la conclusión de un proyecto.
Finalmente, buscando una manera de llegar a un sistema simple y funcional, optamos por un Monocanal para Barco, pero ofreciendo también los pormenores de instalación en el barco.
Nuestro sistema está simplificado al máximo, para obtener un juguete que en términos de costo está muy por debajo de los tipos que se venden armados, pero que sea confiable y realmente proporcione un control seguro del modelo (figura 1).

El alcance es del orden de los 50 metros, con un canal de comando que permite hacer que el barco marche en línea recta, vire a la derecha o a la izquierda.
Se usan dos motores de 6V alimentados por 4 pilas medianas, mientras que el sistema electrónico receptor es alimentado por 4 pilas pequeñas.
Como funciona
En la figura 2 damos un diagrama simplificado de nuestro sistema de radio control con el barco.

El transmisor monocanal emite una señal modulada en tono que es recibido por el circuito existente en el barco.
La utilización de la modulación en tono es importante para reducir la posibilidad de interferencias externas, si bien en regiones de alto nivel de ruidos eléctricos se deben tomar algunas precauciones adicionales.
En la figura 3 mostramos el circuito básico del transmisor, bastante simple, que usa apenas 3 transistores, dos de uso general y uno de RF.

La frecuencia de modulación está determinada por dos capacitores del multivibrador, mientras que la frecuencia de la serial transmitida es determinada por el trimmer Cv y por la bobina L1. Esta bobina es el único componente crítico del montaje, pues algún desvío de sus características impedirá la coincidencia de su señal con el tono del receptor.
El receptor está formado por una etapa superregenerativa tradicional y por un amplificador de audio a continuación.
La señal del amplificador de audio, que corresponde a la modulación, es rectificada y pasando por un amplificador de corriente continua excita un relé miniatura (figura 4).

En la etapa superregenerativa tenemos dos ajustes: de la frecuencia de recepción hecho en el trimmer Cv y del punto de la mayor sensibilidad hecho en el trimpot P1.
En la etapa final de accionamiento del relé tenemos el último ajuste que es del trimpot P2 que lleva al relé al limite del disparo, obteniéndose con esto el máximo de sensibilidad del circuito.
Para facilitar la calibración existe una salida de audio donde se puede conectar un audífono de cristal o un pequeño amplificador de prueba, que nos permite oír la serial del transmisor y ajustar los dos primeros puntos para el máximo de rendimiento.
La sensibilidad del receptor es tan grande, como verán los lectores, que hasta incluso se captaran estaciones distantes. El trimmer debe entonces ser modificado en su sintonía para "escapar" de estas estaciones, pues existe hasta la posibilidad de que estas estaciones interfieran en el control de su barco.
El relé es el último componente de la parte electrónica. Viene a continuación de la parte de control y propulsión.
Se usan dos motores de las mismas características conectados conforme muestra la figura 5, cada uno acoplado directamente a un eje propulsor con hélice.

Con el transmisor inactivo, o sea, sin que se presione su interruptor de comando, el relé se mantiene abierto y con esto sólo queda conectado el motor A.
Con esto, debido a su posición, el barco tiende ha describir una curva según muestra la figura 6 (a).

En el momento en que presionamos el comando del transmisor, el relé cierra sus contactos, de modo que el motor A se para entrando en acción el motor B. Por su posición, el barco, como muestra la figura 6 (b), tiende a virar en el sentido opuesto.
Si presionamos a intervalos regulares el comando, los motores A y E se van poniendo en funcionamiento en forma alternada, de modo que la fuerza propulsora se equilibra y el barco navega prácticamente en línea recta, como muestra la figura (c).
En resumen:
Manteniendo el comando libre, sin presionarlo, el barco vira hacia un lado.
Presionando el comando, el barco vira para el otro lado.
Presionando de modo intermitente el comando, los motores se alternan y el barco navega en línea recta.
Para evitar que las escobillas del motor interfieran en el receptor, son necesarias alimentaciones separadas para estas dos partes del sistema.
El barco debe ser de casco plástico o de madera, con dimensiones que permitan alojar todos los componentes del sistema: receptor y propulsor.
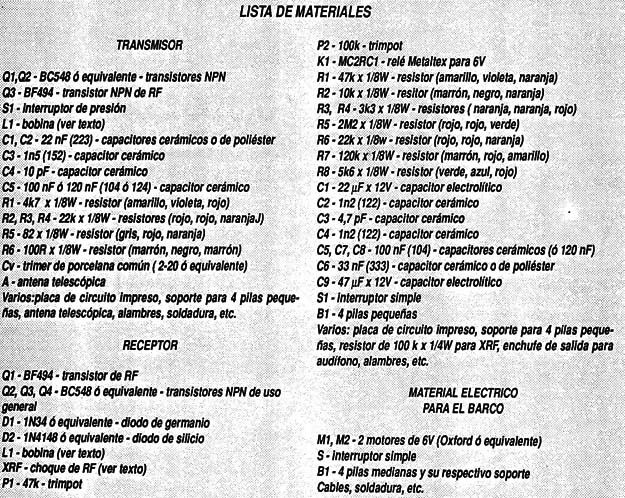
Los componentes
Todos los componentes usados en el montaje son comunes, no habiendo dificultades para su obtención. Hasta incluso el barco, si el lector tuviera dificultades para conseguir el casco, y lo quisiera hacer de madera, como ya dijimos, nada lo impide.
Para la parte electrónica, comenzamos con los transistores que son todos de dos tipos solamente. Los de RF son del tipo BF494B bastante comunes en nuestro mercado y los demás pueden ser de uso general BC547, BC548 ó BC237 y BC238.
El diodo D1 del receptor debe ser de germanio 1N34 o 1N60, mientras que D2 es de silicio de uso general como el 1N4148.
Todos los resistores son de 1/8W y los capacitores de menor valor son cerámicos o de poliéster metalizado, conforme los valores, según la
Los electrolíticos son de 12 6 16V y los trimpots, comunes.
Las bobinas L1, tanto del transmisor como del receptor, deben ser idénticas . bobinadas con alambre común, según las instrucciones. El choque XRF del receptor debe enrollarse en un resistor de 100k x 1/4W.
En la figura 7 mostramos cómo se deben hacer estas dos bobinas.

El relé K1 es de 6V y además de eso precisaremos 3 soportes de pilas. Los dos primeros para 4 pilas pequeñas, uno para el transmisor y uno para el receptor, el tercero es de 4 pilas medianas para la propulsión.
Los motores son de 6V medianos y los trimmers de sintonía Cv del receptor y transmisor son comunes de base de porcelana.
Además de esto, debemos prever la caja y la antena telescópica del transmisor, los interruptores (de presión y simples), cables, y evidentemente las placas de circuito impreso.
Montaje
Comenzamos por los diagramas. En la figura 8 tenemos el circuito completo del transmisor y en la figura 9 el circuito completo del receptor.


Las placas de circuito impreso correspondientes aparecen en la figura 10.

Para el montaje del transmisor y del receptor los principales puntos que debe observar son:
Cuidado con las posiciones de todos los transistores y diodos que son componentes polarizados.
b) Cuidado con las polaridades de los capacitores electrolíticos.
e) Los capacitores cerámicos de bajo valor vienen con la marcación en pF. El valor es dado seguido por una letra mayúscula. Ej.: C3 viene con 4p y C4 como 10J,10M, etc.
(1) Los demás capacitores si son cerámicos, pueden tener los códigos entre paréntesis en lae) La bobina debe ser instalada con cuidado, procurando mantener la separación entre espiras igual en el receptor y en el transmisor. Posteriormente, si hubiera dificultad de sintonía, se pueden apretar o separar más las espiras.
En la figura 11 mostramos una sugerencia de instalación para el transmisor en caja estandarizada.

La antena telescópica del receptor (barco) puede ser un alambre de acero que tendrá por 10 X a menos 40 cm. de largo.
La polaridad de todos los soportes de pilas debe ser observada.
El interruptor del transmisor es un pulsador de timbre (interruptor de presión común).
Terminado el montaje, el lector puede hacer las pruebas y ajustes de funcionamiento antes incluso de su instalación en el barco.
Pruebas iniciales y ajuste
Para las pruebas y ajustes precisamos un audífono del cristal (cuidado, otro tipo no sirve) o bien un amplificador común de audio cuya entrada será conectada en un enchule de salida del receptor. El amplificador dela figura 12 puede usarse para estos ajustes.

Conecte el receptor, apenas colocando las pilas en el soporte y accionando S1. No es preciso conectar los motores.
Apriete el interruptor de comando (S1) del transmisor, teniendo cuidado de desajustar ligeramente el trimmer Cv.
En el audífono o parlante del amplificador conectado al receptor, ajustando el trimmer Cv del receptor y al mismo tiempo el trimpot P1, debe captar un ”silbido" con el máximo de intensidad.
Cuando obtenga la máxima intensidad, aléjese con el transmisor para verificar su alcance. Si el silbido desaparece en menos de 10 metros es porque la sintonía es de una "armónica" y no la serial fundamental.
El ajuste debe rehacerse hasta que consiga captar la señal a por 10 menos 20 metros de distancia. Si no 10 consigue, intente apretar primero la bobina del transmisor y después alejar sus espiras, pues puede estar habiendo discordancia de frecuencia. En último caso, intente alterar el número de vueltas de la bobina del transmisor.
Si oye estaciones comerciales en el receptor, busque un canal libre.
Una vez obtenida la serial máxima, suelte el botón de comando y ajuste ahora P2.
Coloque P2 en una posición en que el relé quede cerca del disparo. Vaya girando P2 hasta verificar que el mismo cierra (preste atención a las láminas en su interior: las mismas "bajan" con un chasquido cuando el relé cierra).
Vuelva un poco el trimpot P2 para que el mismo se mantenga abierto. Vea entonces que toda vez que usted apriete el botón de comando el relé debe cerrarse. Con esto el sistema está listo para funcionar. (Rehaga todos los ajustes para obtener el máximo de sensibilidad).
Atención: el mejor ajuste se obtiene cuando el relé no "traba", o sea, desconecta normalmente cuando soltamos el botón de comando.
Con esto ya puede pasar a la instalación del sistema en el barco.
En la figura 13 mostramos la manera de hacerlo.

Cuidado con la polaridad en los cables de conexión de los motores, pues si hubiera inversión el barco se moverá hacia atrás.
Después de instalar en el barco, hacer la ligación de la antena, y proceder a un nuevo ajuste de funcionamiento. Comprobado el funcionamiento normal solo resta buscarse una laguna, estanque o pileta de natación y jugar.
Atención: no use el barco en lagos grandes o rios, pues puede perder el control si el barco se sale del alcance del transmisor, y en esos casos la recuperación del barco se vuelve problemática.
Jugando
Para operar el barco basta conectar el receptor, y enseguida comenzará la alimentación de uno de los motores (coloque las pilas medianas en el soporte y accione S1).
Después, basta actuar sobre el comando del transmisor para hacer que el barco siga en la dirección deseada. Con un poco de práctica el lector no tendrá dificultades para dirigirlo como un verdadero comandante.
Si opera en una zona congestionada, o sea, si hubiera otros modelos, puede haber alguna interferencia. En este caso, cambie la frecuencia del transmisor como del receptor, actuando sobre los Cv (trimmers).
Las pilas medianas tienen buena durabilidad, dependiendo del motor, y las del receptor y transmisor tienen durabilidad mayor. El cambio de las medianas será por lo tanto más frecuente. Para una autonomía mayor y por lo tanto mayor confiabilidad, use pilas alcalinas.