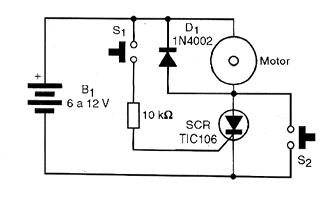
Con un toque en el interruptor S1 el motor se enciende y así permanece hasta que un toque en el interruptor S2 lo apague. El circuito mostrado en la figura puede ser usado en muchas aplicaciones importantes de robótica y mecatrónica. Como los interruptores S1 y S2 pueden ser sensores, tales como reed-switches, llaves de final de carrera y otros sensores, las aplicaciones son ilimitadas. Basta con tocar un interruptor por ejemplo, y una cinta se mueve hasta transportar un objeto hasta su final. Al final, el sensor S2 está activado y la cinta para el modo automático. El SCR no necesita radiador de calor para motores de hasta 500 mA. Por encima de eso será conveniente usar una pequeña plancha de metal para este propósito. El diodo D1 sirve como filtro para evitar que pulsos de transitorios generados en la conmutación de las bobinas del motor aparezcan sobre el SCR causando su apagado en un momento indebido. Si hay tendencia al apagado incluso con el diodo, un capacitor electrolítico de 100 uF a 1 000 uF debe ser conectado también en paralelo con este componente. Un punto importante que se debe observar en este circuito es que hay una caída de tensión del orden de 2 voltios en un SCR conectado. Esto quiere decir que la tensión de alimentación debe ser 2 V mayor que la requerida por el motor para compensar esta pérdida. Es por este motivo que la tensión mínima de entrada sugerida para estos circuitos es de 6 volts.