En el proyecto usando microcontroladores, como el Arduino. MSP430, PIC y otros, es necesaria la utilización de shields o interfaces, pues el microcontrolador no lo hace todo solo. Así, en el accionamiento de motores, solenoides, relés y otras cargas, lectura de sensores es necesario contar con estos circuitos externos. En nuestro sitio tenemos una infinidad de ellos, algunos listos y otros necesitando adaptaciones según el uso. En este artículo damos una pequeña selección de ellos.
Además de los numerosos proyectos de shields con los que el lector puede contar en este sitio, tenemos publicaciones en las que se abordan. Así, podemos sugerir nuestro libro de la serie Banco de Circuitos - vol 30 donde el lector encuentra 100 proyectos de circuitos prácticos.
Para este artículo, seleccionamos una buena cantidad de shields simples que pueden ser de utilidad para nuestros lectores que hacen proyectos con microcontroladores.
Dependiendo de la aplicación y del microcontrolador utilizado, algunos de estos shields pueden requerir pequeños cambios de componentes o de tensiones usadas en la alimentación.
1. Controlador para motor DC
Este circuito puede servir de base para el diseño de pequeños robots controlados por microcontroladores (shield de potencia sin relé). El circuito puede controlar motores hasta 500 mA y con el cambio de los transistores motores de potencias mayores.
El circuito descrito puede tener las etapas lógicas alimentadas por 23,3 o 5 V y la etapa de potencia del motor con tensiones mayores a partir de 5 V conforme al motor.
Utilizando el TIP31 y TIP32 en los pasos de salida los motores pueden llegar a los 2 A. Estos transistores deben estar dotados de disipadores de calor.
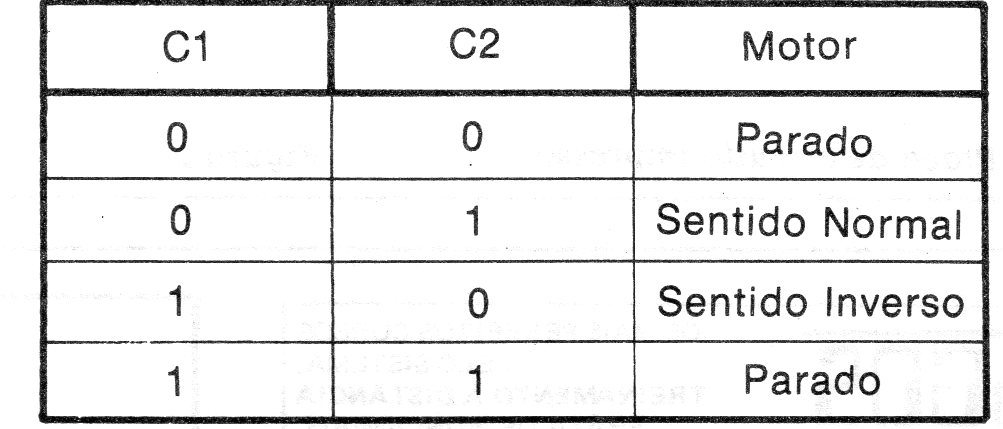
En la tabla siguiente tenemos las condiciones de los motores en función de las señales de entrada.
El diagrama completo del control se muestra en la figura 1.

Una placa de circuito impreso para el montaje es sugerida en la figura 2.

El capacitor en paralelo con el motor eventualmente debe ser aumentado si se observa inestabilidad de funcionamiento debido al ruido de las escobillas
2. Interfaz simple TTL
Este circuito puede ser utilizado como una interfaz de salida para ordenadores personales que tienen el puerto paralelo (antiguos) y también como shield para microcontroladores con las debidas adaptaciones. Los componentes usados son comunes.
Este circuito de shield o interfaz puede ser utilizado con diversas finalidades para controlar el flujo de datos entre un microcontrolador o computadora y un circuito controlado.
La alimentación debe realizarse con tensión de 5 V y las salidas deben tener en cuenta la capacidad de corriente disponible, accionando eventualmente etapas de potencia.
El diagrama completo de la interfaz se da en la figura 3.

La placa de circuito impreso se muestra en la figura 4.

En el montaje se deben observar las posiciones de los circuitos integrados y las pistas deben ser cuidadosamente comprobadas para que no ocurran cortos.
3. Flip Flop Óptico
Este proyecto experimental didáctico muestra cómo es posible implementar con optoacopladores un flip-flop óptico. El circuito es compatible con la lógica TTL y puede ser utilizado en clases o incluso proyectos que exijan aislamiento completo.
La alimentación se realiza con una tensión de 5 V y se debe conectar en serie con los LED emisores resistores compatibles con la aplicación.
Para utilizar como un shield microcontrolado el resistor en serie con el LED puede ser de 220 ohms para lógica de 3,3 V y 330 ohms para lógica de 5 V.
Se pueden utilizar acopladores ópticos equivalentes.
En la figura 5 tenemos el diagrama completo del flip-flop.

En la figura 6 tenemos una sugerencia de placa de circuito impreso para el montaje.

4. Puente H con MOSFET de Potencia
El circuito presentado en la figura 7 posibilita el control de motores de corriente continua de varios amperios a partir de señales lógicas CMOS.

Dos de las puertas de un circuito integrado 4011 se utilizan como inversores. Se conectan de tal forma que, cuando una se encuentra con la salida en el nivel alto la otra, obligatoriamente se encuentra con la salida en el nivel bajo.
De esta forma, los transistores de efecto de campo de potencia que forman el puente H conducen dos a dos estableciendo sentidos diferentes de circulación de la corriente a través del motor. Con el nivel alto en la entrada el motor gira en un sentido y con el nivel bajo en la dirección opuesta.
La corriente máxima del motor controlado depende sólo de los transistores elegidos.
La alimentación se puede hacer con tensiones diferentes de 12 V, según el motor empleado. Con tensiones inferiores a 9 V, la resistencia entre el drenaje y la fuente de los transistores comienza a volverse sensible en las pérdidas para el motor.
Es posible que sea necesario conectar en paralelo con el motor un capacitor de 1 a 10 uF (despolarizado) para evitar inestabilidades causadas por la conmutación de sus escobillas.
En la figura 8 tenemos una sugerencia de placa de circuito impreso para este montaje.

Observe que, dependiendo de la intensidad de la corriente requerida por el motor, los transistores deben estar dotados de radiadores de calor apropiados.
5. Shield de control bidireccional de motor DC
El circuito mostrado en la figura 9 es un "medio puente H" y su finalidad es controlar el sentido de rotación de un motor de corriente continua a partir de la polaridad de la señal de entrada.
Con una señal positiva el motor gira en el sentido directo. Con una señal negativa en sentido inverso. Sin señal o con una tensión de 0 V el motor estará parado.
Los motores de hasta 2 A con tensiones en el rango de 6 a 15 V de alimentación pueden ser controlados por este circuito.

Utilidades:
• Control lógico de motores en automatismos y proyectos de mecatrónica a partir de sensores conectados a los comparadores de tensión.
• Interfaz de motores con ordenadores mediante un circuito intermedio apropiado.
• Inversión del sentido de circulación en automatismos de corriente continua como, por ejemplo, solenoides.
• Control de sentido de movimiento en robots y otros dispositivos móviles usando claves como sensores.
• Implementación de controles PWM aplicando pulsos de frecuencia y polaridad apropiada, según el sentido y velocidad deseada para los motores.
Detalles constructivos:
Los transistores de potencia admiten equivalentes según la corriente del motor u otra carga controlada. Estos transistores deben estar dotados de disipadores de calor.
El circuito necesita una corriente de entrada de al menos 5 mA para el accionamiento de un motor de 500 mA con transistores de ganancia 100.
Esto significa una tensión del orden de al menos 5 V en la entrada, con polaridad que dependerá del sentido de giro deseado.
Las ganancias mayores se pueden obtener con los transistores Darlington de potencia.
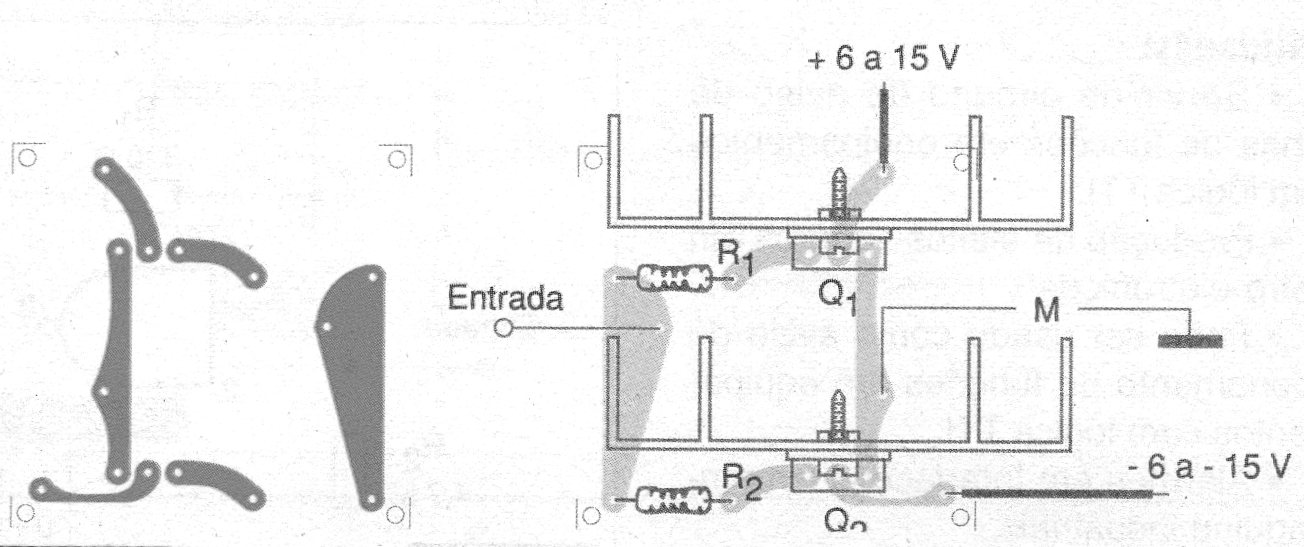
En la figura 10 tenemos una sugerencia de placa de circuito impreso, aunque la configuración puede ser implementada en la propia placa que contiene el circuito completo de control.
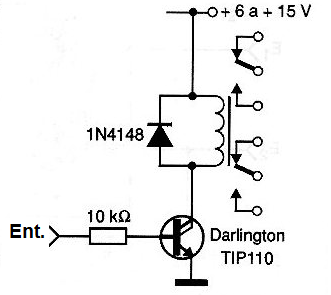
6. Shield para accionamiento de relé o solenoide
Las placas de Arduino tienen una capacidad limitada de corriente. Si bien cada salida puede proporcionar una buena corriente, si accionamos muchos relés o cargas, en el conjunto la fuente usada puede sufrir e incluso haber problemas de calentamiento del microcontrolador.
Otro problema está en el hecho de no disponer de un relé de 5 V o 3,3 V y deseamos usar un relé de mayor tensión. Una posibilidad para ahorrar energía del microcontrolador consiste en utilizar Shields separados para relés que pueden tener alimentaciones separadas hasta 12 V. Este circuito muestra cómo es posible.
Con el circuito de la figura 11 es posible accionar relés de 20 mA a 100 mA de corriente de bobina con tensiones de 6 a 12 V, aplicando una corriente de entrada de sólo 5 uA.
El circuito puede también accionar cargas mayores con el cambio de Q2 por un BD135 caso en que la corriente máxima puede llegar a 500 mA con el accionamiento de solenoides y motores directamente. El circuito puede ser alimentado por tensiones de 6 a 12 V conforme a la carga alimentada.
Finalmente, el resistor de 1M5 debe ser reducido si se constata una ganancia insuficiente del circuito.

7. Shield para accionamiento de relé en el control de motores II
Lo que diferencia este circuito del anterior es la necesidad de una corriente mucho menor para accionamiento y sólo un transistor.
El relé puede ser de 5 o 12 V según la alimentación y la fuente tanto para el motor como para este circuito debe separarse del microcontrolador. Con ello se evita el problema de interferencias de las escobillas del motor.